Salvatore Orlando(*), Paolo Palmerini
(*)Dipartimento di Informatica, Università Ca' Foscari, Venezia, Italy - email: orlando@unive.it
Salvatore Orlando(*), Paolo Palmerini![]() ,
Raffaele Perego
,
Raffaele Perego![]()
(*)Dipartimento di Informatica,
Università Ca' Foscari, Venezia, Italy - email: orlando@unive.it
![]() Istituto CNUCE,
Consiglio Nazionale delle Ricerche (CNR), Pisa, Italy -
email:{paolo.palmerini,raffaele.perego}@cnuce.cnr.it
Istituto CNUCE,
Consiglio Nazionale delle Ricerche (CNR), Pisa, Italy -
email:{paolo.palmerini,raffaele.perego}@cnuce.cnr.it
Experience in applicative fields, above all deriving from the
development of multidisciplinary parallel applications, seems to
suggest a model where an outer coordination level is provided to
allow data parallel tasks to run concurrently and to cooperate each
other. The inner computational level of this coordination model can
easily be expressed with HPF, a high-level data-parallel
language. According to this model, we devised COLT![]() ,
a coordination
architectural layer that supports dynamic creation and concurrent
execution of HPF tasks, and permits these tasks to cooperate though
message passing. This paper proposes the exploitation of COLT
,
a coordination
architectural layer that supports dynamic creation and concurrent
execution of HPF tasks, and permits these tasks to cooperate though
message passing. This paper proposes the exploitation of COLT![]() by
means of a simple skeleton-based coordination language and the
associated source-to-source compiler. Differently from other related
proposals, COLT
by
means of a simple skeleton-based coordination language and the
associated source-to-source compiler. Differently from other related
proposals, COLT![]() is portable and can exploit commercial,
standard-compliant, HPF compilation systems. We used a physics
application as a test-case for our approach, and we present the
results of several experiments conducted on a cluster of Linux SMPs.
is portable and can exploit commercial,
standard-compliant, HPF compilation systems. We used a physics
application as a test-case for our approach, and we present the
results of several experiments conducted on a cluster of Linux SMPs.
Keywords: Task parallelism, Data Parallelism, Coordination Languages, HPF.
Many applications belonging to important application fields exhibit a large amount of potential parallelism that can be exploited at both the data and the task level. The exploitation of data parallelism requires the same computations to be applied to different data, while task parallelism entails splitting the application into several parts, which are executed in parallel on different (groups of) processors. These parts then communicate and synchronize with each other by means of message passing or other mechanisms. Data parallelism is generally easier to exploit due to the simpler computational model involved. In addition, data-parallel languages are available which substantially help the programmer to develop data-parallel programs. High Performance Fortran (HPF) is the most notable example of such languages [13]. Unfortunately, data-parallelism alone does not allow many potentially parallel applications to be dealt with efficiently. Task parallelism is in fact often needed to reflect the natural structure of the application algorithm or to efficiently implement applications that exhibit only a limited amount of data parallelism. Many multidisciplinary applications (e.g. global climate modeling), as well as many applications belonging to various fields (e.g computer vision, real-time signal processing) do not allow efficient data-parallel solutions to be devised, but can be efficiently structured as ensembles of sequential and/or data-parallel tasks which cooperate according to a few common patterns [3,7,12].
The capability of integrating task and data parallelism into a single framework is the subject of many proposals since it allows the number of addressable applications to be considerably enlarged [11,16,10,8,6,14]. Also the latest version of the HPF standard, HPF 2.0, provides extensions which allows restricted forms of task parallelism to be exploited [13]. Unfortunately, the extensions are not suitable for expressing complex interactions among asynchronous tasks as required by multidisciplinary applications. Moreover, communication among tasks can occur only implicitly at the subroutine boundaries, and non-deterministic communication patterns cannot be expressed. A different approach regards the design of an HPF binding for a standard message-passing library such as MPI [10]. Low-level message passing primitives are provided which allow the exchange of distributed data among concurrent HPF tasks. The integration of task and data parallelism has also been proposed within an object-oriented coordination language such as Opus [8]. By using a syntax similar to that of HPF, Opus programmers can define classes of objects which encapsulate distributed data and data-parallel methods.
In this paper we present COLT![]() (COordination Layer for Tasks
expressed in HPF), a portable coordination layer for HPF
tasks. COLT
(COordination Layer for Tasks
expressed in HPF), a portable coordination layer for HPF
tasks. COLT![]() is implemented on top of PVM and provides suitable
mechanisms for starting, even at run-time, instances of data-parallel
tasks on disjoint groups of (PVM virtual) processors, along with
optimized primitives for inter-task communication where data to be
exchanged may be distributed among the processors according to
user-specified HPF directives.
is implemented on top of PVM and provides suitable
mechanisms for starting, even at run-time, instances of data-parallel
tasks on disjoint groups of (PVM virtual) processors, along with
optimized primitives for inter-task communication where data to be
exchanged may be distributed among the processors according to
user-specified HPF directives.
There are many possible uses of the COLT![]() layer. Its interface can
be used directly by programmers to write their applications as a flat
collection of interacting data-parallel tasks. This low-level
approach to HPF task parallelism has already been proposed by Foster
et al. for the above mentioned HPF-MPI binding [10]. With
respect to this proposal, COLT
layer. Its interface can
be used directly by programmers to write their applications as a flat
collection of interacting data-parallel tasks. This low-level
approach to HPF task parallelism has already been proposed by Foster
et al. for the above mentioned HPF-MPI binding [10]. With
respect to this proposal, COLT![]() introduces new and important
features, namely its complete portability among distinct compilation
systems, and the run-time management of HPF tasks. Indeed, in our
view the best use of COLT
introduces new and important
features, namely its complete portability among distinct compilation
systems, and the run-time management of HPF tasks. Indeed, in our
view the best use of COLT![]() is through a compiler of a high-level
coordination language aimed at facilitating programmers in structuring
their data-parallel tasks according to compositions of common skeletons for task-parallelism such as pipelines, processor
farms, master-slaves, etc. [1,14]. A
previous version of COLT
is through a compiler of a high-level
coordination language aimed at facilitating programmers in structuring
their data-parallel tasks according to compositions of common skeletons for task-parallelism such as pipelines, processor
farms, master-slaves, etc. [1,14]. A
previous version of COLT![]() used MPI as a message transport layer among
HPF tasks. The exploitation of MPI, however, required slight
modifications to the HPF run-time, thus preventing the use of
commercial HPF compilers. Here on the other hand, we discuss the use
of PVM, whose features allowed us to overcome this limitation of the
previous proposal, and also to support a dynamic task model,
where HPF tasks can be created/managed at run-time. As a consequence,
the PVM version of COLT
used MPI as a message transport layer among
HPF tasks. The exploitation of MPI, however, required slight
modifications to the HPF run-time, thus preventing the use of
commercial HPF compilers. Here on the other hand, we discuss the use
of PVM, whose features allowed us to overcome this limitation of the
previous proposal, and also to support a dynamic task model,
where HPF tasks can be created/managed at run-time. As a consequence,
the PVM version of COLT![]() can profitably be used to program
heterogeneous networks of computers/workstations as well, where the
adoption of a purely static task model may fail due to the large and
often unpredictable variations in the load and power of the
computational resources available.
can profitably be used to program
heterogeneous networks of computers/workstations as well, where the
adoption of a purely static task model may fail due to the large and
often unpredictable variations in the load and power of the
computational resources available.
We used a physics application as a test-case for validating our approach, while the testbed system was a cluster of Linux 2-way SMPs, interconnected by a 100BaseT switched Ethernet, where each SMP was equipped with two Pentium II - 233 MHz processors and 128 MB of main memory. The HPF compiler used was pghpf from the Portland Group Inc., version 3.0-4.
The paper is organized as follows. Section 2
discusses the coordination model behind our proposal for integrating
task and data parallelism, and the main implementation issues.
Moreover, it introduces the design and functionalities of COLT![]() ,
and
describes its implementation on top of PVM. In
Section 3 the test-case application is presented, and
two different COLT
,
and
describes its implementation on top of PVM. In
Section 3 the test-case application is presented, and
two different COLT![]() mixed task and data parallel implementations are
described. The results of the experiments conducted on our cluster of
SMPs are also reported and discussed in depth. Finally,
Section 4 draws some conclusions.
mixed task and data parallel implementations are
described. The results of the experiments conducted on our cluster of
SMPs are also reported and discussed in depth. Finally,
Section 4 draws some conclusions.
Experience in applicative fields, above all deriving from the
development of multidisciplinary applications, seems to suggest
that the best way to integrate task and data parallelism is to keep
them on two distinct levels [3]: an outer coordination level for task parallelism, and an inner computational level for data parallelism.
Task parallelism requires
languages/programming environments that allow concurrent tasks to coordinate their execution and communicate with each other.
Programmers are responsible for selecting the code executed by each
task, and for expressing the interaction among the tasks. Most task
parallel programming environments provide a separate address space for
each task, and require programmers to explicitly insert communication
statements in their code. On the other hand, data parallelism is
considered ``easy'' to express, at least for ``regular'' problems. It
is efficiently exploited on most parallel architectures by means of
SPMD (Single Program Multiple Data) programs. However, the
hand-coding of SPMD programs for distributed-memory machines is very
tedious and error-prone. Fortunately, high-level languages such as
HPF allow programmers to easily express data parallel programs in a
single, global address space. The associated compiler, guided by
user-provided directives, produces an SPMD program optimized for the
target machine, and transparently generates the code for data
distribution, communication, and synchronization.
In this paper we show how an existing HPF compiler, in our case a
commercial compilation system by the Portland Group Inc. (PGI), can be
used to build the inner ``computational'' level of the above model.
To this end we devised COLT![]() ,
a run-time support that allows HPF tasks
to be created either statically or dynamically, and provides
primitives for the asynchronous message-passing of scalar and vector
data. COLT
,
a run-time support that allows HPF tasks
to be created either statically or dynamically, and provides
primitives for the asynchronous message-passing of scalar and vector
data. COLT![]() is thus the basis to construct the ``coordination''
outer level required to integrate task and data parallelism.
is thus the basis to construct the ``coordination''
outer level required to integrate task and data parallelism.
 |
Note that other coordination mechanisms, besides message-passing,
could be adopted for task parallelism integration: for example, either
Remote Procedure Calls (or Remote Method Invocations, if
object-oriented wrappers were provided for HPF modules), or a virtual
shared space, such as a Distributed Shared Memory abstraction or a
Linda tuple-space [5]. We chose a simpler, but more
efficient, message-passing abstraction, where array data are
asynchronously sent over communication channels, but at the same time
we recognized that message-passing is error-prone and too low level to
express task parallelism. We are thus working to exploit COLT![]() by
means of a high-level skeleton-based coordination
language [1,14]. The coordination of HPF
tasks is expressed by means of specific language constructs, each
corresponding to a very common skeleton for task parallelism, i.e.
pipeline, processor farm, master-slaves, etc. Programmers choose the
best skeleton for their purposes, and for each task in the skeleton
specify the HPF computational code as well as the list of
input/output data exchanged between the tasks. Skeleton are in turn
implemented by means of a set of templates, a sort of
``wrappers'' for the user-provided computational codes. The templates encapsulate all the control and coordination code needed to
implement the associated parallel programming skeleton. By
instantiating the templates, the compiler produces the ensemble
of HPF programs implementing the required mixed task and data parallel
application.
by
means of a high-level skeleton-based coordination
language [1,14]. The coordination of HPF
tasks is expressed by means of specific language constructs, each
corresponding to a very common skeleton for task parallelism, i.e.
pipeline, processor farm, master-slaves, etc. Programmers choose the
best skeleton for their purposes, and for each task in the skeleton
specify the HPF computational code as well as the list of
input/output data exchanged between the tasks. Skeleton are in turn
implemented by means of a set of templates, a sort of
``wrappers'' for the user-provided computational codes. The templates encapsulate all the control and coordination code needed to
implement the associated parallel programming skeleton. By
instantiating the templates, the compiler produces the ensemble
of HPF programs implementing the required mixed task and data parallel
application.
COLT![]() is currently binded to HPF only, and is specifically designed
to consider the issues deriving from the communication of distributed array data. Further work consists in extending COLT
is currently binded to HPF only, and is specifically designed
to consider the issues deriving from the communication of distributed array data. Further work consists in extending COLT![]() to
permit tasks written with different, also sequential languages such as
Fortran 77, C/C++, and Java, to communicate each other. This feature
will allow us to increase the number of addressable application
fields, and, in particular, will make the resulting programming
environment suitable for solving emerging multidisciplinary
applications. A first step in this direction has been already made
with the integration of COLT
to
permit tasks written with different, also sequential languages such as
Fortran 77, C/C++, and Java, to communicate each other. This feature
will allow us to increase the number of addressable application
fields, and, in particular, will make the resulting programming
environment suitable for solving emerging multidisciplinary
applications. A first step in this direction has been already made
with the integration of COLT![]() within the run-time of SkIE-CL, a
skeleton-based multi-language coordination
environment [2,18].
within the run-time of SkIE-CL, a
skeleton-based multi-language coordination
environment [2,18].
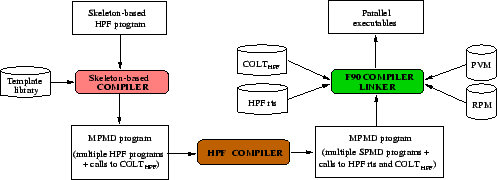
The integration of task and HPF data parallelism presents several
implementation issues, deriving from the need to coordinate parallel
tasks rather than sequential processes. Since most HPF compilers
generate an SPMD f90/f77 code containing calls to the HPF run-time
system responsible for data distribution and communication, a COLT![]() mixed task and data parallel program corresponds to an ensemble of
distinct SPMD parallel programs (an MPMD program) coordinated by means
of COLT
mixed task and data parallel program corresponds to an ensemble of
distinct SPMD parallel programs (an MPMD program) coordinated by means
of COLT![]() .
By exploiting the templates corresponding to the
skeletons specified by programmers, our skeleton-based compiler
has thus to generate multiple HPF programs containing calls to the
COLT
.
By exploiting the templates corresponding to the
skeletons specified by programmers, our skeleton-based compiler
has thus to generate multiple HPF programs containing calls to the
COLT![]() run-time support. Such multiple HPF programs then have to be
compiled with the HPF compiler and linked with the COLT
run-time support. Such multiple HPF programs then have to be
compiled with the HPF compiler and linked with the COLT![]() and HPF
libraries. Finally, note that both COLT
and HPF
libraries. Finally, note that both COLT![]() and HPF run-time supports
use some low-level message-passing middleware. The pghpf
compiler used exploits RPM, the PGI Real Parallel Machine system. On
the other hand, COLT
and HPF run-time supports
use some low-level message-passing middleware. The pghpf
compiler used exploits RPM, the PGI Real Parallel Machine system. On
the other hand, COLT![]() exploits PVM for inter-task communications. The
PVM and RPM libraries must thus also be linked to the MPMD object
files in order to obtain the executables for the target machine.
The overall structure of the hierarchy of compilers which implement
our model for task and data parallelism integration is shown in
Figure 1.
exploits PVM for inter-task communications. The
PVM and RPM libraries must thus also be linked to the MPMD object
files in order to obtain the executables for the target machine.
The overall structure of the hierarchy of compilers which implement
our model for task and data parallelism integration is shown in
Figure 1.
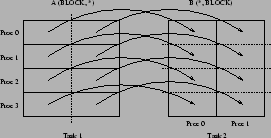
The primitives to exchange array data structures constitute one of the
main difficulties in implementing COLT![]() .
Consider, in fact, that
arrays can be distributed differently on the groups of processors
running the various HPF tasks. Moreover, since HPF compilers usually
produce executable code in which the degree of parallelism can be
established at running time, the actual boundaries of array sections
allocated on each processor executing the HPF task are not statically
known. COLT
.
Consider, in fact, that
arrays can be distributed differently on the groups of processors
running the various HPF tasks. Moreover, since HPF compilers usually
produce executable code in which the degree of parallelism can be
established at running time, the actual boundaries of array sections
allocated on each processor executing the HPF task are not statically
known. COLT![]() thus inspects at run-time the HPF support to find out
on both the sender and receiver sides the actual mapping of any
distributed array exchanged. By means of the Ramaswamy and Banerjee's
pitfalls algorithm [15], all the processes involved
in the communication then compute the intersections of their own array
partitions with the ones of the processes belonging to the partner
task. A global communication schedule is then derived. It
establishes, for each sender process, the portion of array section
which must be sent to each process of the receiver task. On the other
side, each process of the receiver task computes which array portions
it has to receive from any of the sender processes. Note that
communicating distributed data between data-parallel tasks thus
entails making several point-to-point communications, which, in our
case, are PVM communications. A simple example of the point-to-point
communications required to communicate a distributed array is
illustrated in Figure 2.
thus inspects at run-time the HPF support to find out
on both the sender and receiver sides the actual mapping of any
distributed array exchanged. By means of the Ramaswamy and Banerjee's
pitfalls algorithm [15], all the processes involved
in the communication then compute the intersections of their own array
partitions with the ones of the processes belonging to the partner
task. A global communication schedule is then derived. It
establishes, for each sender process, the portion of array section
which must be sent to each process of the receiver task. On the other
side, each process of the receiver task computes which array portions
it has to receive from any of the sender processes. Note that
communicating distributed data between data-parallel tasks thus
entails making several point-to-point communications, which, in our
case, are PVM communications. A simple example of the point-to-point
communications required to communicate a distributed array is
illustrated in Figure 2.
Since computing array intersections and communication schedules is
quite expensive, and the same array transmission is usually repeated
several times, COLT![]() reuses them when possible by storing this
information into appropriate channel descriptors.
reuses them when possible by storing this
information into appropriate channel descriptors.
|
Finally, it is worth point out that, in order to obtain portability
among different HPF compilation systems, COLT![]() exploits HPF standard
features to interact with the HPF run-time system, and is implemented
as a library of standard HPF_LOCAL EXTRINSIC
subroutines [13]. This means that when a COLT
exploits HPF standard
features to interact with the HPF run-time system, and is implemented
as a library of standard HPF_LOCAL EXTRINSIC
subroutines [13]. This means that when a COLT![]() primitive is invoked, all the processes executing the HPF task switch
from the single thread of the control model supplied by HPF to a true
SPMD style of execution. In other words, through an HPF_LOCAL
routine programmers can get the SPMD program generated by the HPF
compiler under their control.
primitive is invoked, all the processes executing the HPF task switch
from the single thread of the control model supplied by HPF to a true
SPMD style of execution. In other words, through an HPF_LOCAL
routine programmers can get the SPMD program generated by the HPF
compiler under their control.
Another important implementation choice regards the low-level
communication middleware exploited for inter-task communications. As
mentioned above, in this paper we discuss the adoption of PVM. On the
other hand MPI was adopted in a previous release of
COLT![]() [14]. MPI supports a static SPMD model,
according to which the same program has to be loaded on all the
virtual processors on which the mixed task and data parallel program
has to be mapped. However, our MPMD model of execution was achieved
by forcing disjoint groups of MPI processes to execute distinct HPF
subroutines corresponding to the various HPF task involved. As
a consequence, we had to modify the HPF run-time system in order to
make each SPMD subprogram implementing an HPF task exploit a distinct
communication context embracing only the corresponding group of MPI
processes. Note that for the MPI-based version of COLT
[14]. MPI supports a static SPMD model,
according to which the same program has to be loaded on all the
virtual processors on which the mixed task and data parallel program
has to be mapped. However, our MPMD model of execution was achieved
by forcing disjoint groups of MPI processes to execute distinct HPF
subroutines corresponding to the various HPF task involved. As
a consequence, we had to modify the HPF run-time system in order to
make each SPMD subprogram implementing an HPF task exploit a distinct
communication context embracing only the corresponding group of MPI
processes. Note that for the MPI-based version of COLT![]() we had to
use a public-domain HPF compiler [4], for which the source
code of the run-time support was available and modifiable. Moreover,
the MPI static task model prevented the exploitation of ``adaptive
parallelism'' approaches which result to be very effective on
non-traditional parallel architectures such as clusters of
workstations.
we had to
use a public-domain HPF compiler [4], for which the source
code of the run-time support was available and modifiable. Moreover,
the MPI static task model prevented the exploitation of ``adaptive
parallelism'' approaches which result to be very effective on
non-traditional parallel architectures such as clusters of
workstations.
On the other hand, the PVM-based version of COLT![]() discussed in this
paper supports a dynamic task model, according to which any HPF task
(compiled as a separate executable) can be started on demand
at run-time and participate in the COLT
discussed in this
paper supports a dynamic task model, according to which any HPF task
(compiled as a separate executable) can be started on demand
at run-time and participate in the COLT![]() application. This allows the
set of running HPF tasks to be enlarged or restricted dynamically in
order to adapt the running application to varying conditions of the
computing environment used. Moreover, since we do not need to modify the
HPF run-time system, a commercial compilation system like the
PGI one can be employed.
application. This allows the
set of running HPF tasks to be enlarged or restricted dynamically in
order to adapt the running application to varying conditions of the
computing environment used. Moreover, since we do not need to modify the
HPF run-time system, a commercial compilation system like the
PGI one can be employed.
In order to exploit task parallelism on top of PVM, our approach
entails distinct HPF tasks being run concurrently onto disjoint groups
of virtual processors of the same PVM machine. Since processes
enroll themselves in the PVM machine at run-time, we exploited PVM
dynamic process model to support a dynamic HPF task model as well:
HPF tasks, which are compiled as separate executable SPMD
programs linked with the COLT![]() and PVM libraries, enroll themselves
in the COLT
and PVM libraries, enroll themselves
in the COLT![]() application at run-time, and can ask for other HPF tasks
to be created dynamically.
application at run-time, and can ask for other HPF tasks
to be created dynamically.
Usually HPF executables exploit compiler-dependent mechanisms for
loading and starting on the parallel system. For example, the pghpf compiler produces an executable that accepts specific
command-line parameters. Hence, while HPF tasks have to be launched
by exploiting their proprietary mechanisms, COLT![]() provides an
initialization primitive to enroll them in PVM. Through this
primitive, all the processes running a task (i.e., the processes
participating in the corresponding SPMD subprogram generated by the
HPF compiler) enroll in PVM and receive their own PVM identifiers
(hereafter pvm_tids). Since these pvm_tids must
actually be used within COLT
provides an
initialization primitive to enroll them in PVM. Through this
primitive, all the processes running a task (i.e., the processes
participating in the corresponding SPMD subprogram generated by the
HPF compiler) enroll in PVM and receive their own PVM identifiers
(hereafter pvm_tids). Since these pvm_tids must
actually be used within COLT![]() to exchange PVM point-to-point messages
among the processes running the various tasks, the COLT
to exchange PVM point-to-point messages
among the processes running the various tasks, the COLT![]() implementation has to know the correspondence between the various HPF
tasks, each one identified by a distinct colt_tid, and the sets
of pvm_tids corresponding to the groups of processes running
the tasks themselves. COLT
implementation has to know the correspondence between the various HPF
tasks, each one identified by a distinct colt_tid, and the sets
of pvm_tids corresponding to the groups of processes running
the tasks themselves. COLT![]() thus maintains this knowledge within a
replicated data structure, hereafter mapping table. In order to
build the mapping table, the COLT
thus maintains this knowledge within a
replicated data structure, hereafter mapping table. In order to
build the mapping table, the COLT![]() initialization primitive
interacts with a specific COLT
initialization primitive
interacts with a specific COLT![]() daemon, hereafter
daemon, hereafter ![]() .
We
introduced the
.
We
introduced the ![]() ,
however, not only to centralize task
registration, but also to handle static and, above all, dynamic task creation. Static task creation exploits a user-provided
configuration file that stores, for each task to be started at
launching time, (a) the name of the associated HPF executable module, (b) the degree of parallelism for the task,
(c) the list of PVM hosts onto which the task has to be
executed, and (d) the colt_tid to be assigned to it. By
means of the mechanisms provided by the OS and the specific HPF
compilation system used,
,
however, not only to centralize task
registration, but also to handle static and, above all, dynamic task creation. Static task creation exploits a user-provided
configuration file that stores, for each task to be started at
launching time, (a) the name of the associated HPF executable module, (b) the degree of parallelism for the task,
(c) the list of PVM hosts onto which the task has to be
executed, and (d) the colt_tid to be assigned to it. By
means of the mechanisms provided by the OS and the specific HPF
compilation system used, ![]() starts the various HPF tasks
specified in the configuration file2. As soon as a spawned HPF task starts
executing, it calls the COLT
starts the various HPF tasks
specified in the configuration file2. As soon as a spawned HPF task starts
executing, it calls the COLT![]() initialization primitive to make all
the processes running the task enroll in the PVM machine and exchange
information with
initialization primitive to make all
the processes running the task enroll in the PVM machine and exchange
information with ![]() .
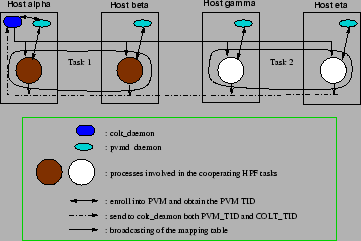
In this way,
.
In this way, ![]() receives
from each spawned process the pair (pvm_tid, colt_tid),
and builds the mapping table accordingly. Finally, the complete
mapping table is broadcast to to all the processes running the
spawned HPF tasks. Figure 3 illustrates the steps
discussed above, by showing the interactions between the
receives
from each spawned process the pair (pvm_tid, colt_tid),
and builds the mapping table accordingly. Finally, the complete
mapping table is broadcast to to all the processes running the
spawned HPF tasks. Figure 3 illustrates the steps
discussed above, by showing the interactions between the
![]() and two HPF tasks, each one running on a couple of
workstations.
and two HPF tasks, each one running on a couple of
workstations.
HPF tasks can furtherly interact with the ![]() to ask for
the dynamic creation of new HPF tasks. The input parameters of
the COLT
to ask for
the dynamic creation of new HPF tasks. The input parameters of
the COLT![]() primitive for the dynamic spawning of an HPF task are the
pathname of the executable file, the degree of parallelism
of the task, and the list of PVM hosts. The unique colt_tid associated with the HPF task to be created is in this case
chosen by
primitive for the dynamic spawning of an HPF task are the
pathname of the executable file, the degree of parallelism
of the task, and the list of PVM hosts. The unique colt_tid associated with the HPF task to be created is in this case
chosen by ![]() and returned to the requesting HPF task. The
interactions between the dynamically started processes and the
and returned to the requesting HPF task. The
interactions between the dynamically started processes and the
![]() are similar to those illustrated in
Figure 3:
are similar to those illustrated in
Figure 3: ![]() updates its copy of the mapping table by adding a row concerning the newly created task,
broadcasts the updated table to all the processes running the new
task, and sends the new row added to the table to the task which asked
for the dynamic creation.
updates its copy of the mapping table by adding a row concerning the newly created task,
broadcasts the updated table to all the processes running the new
task, and sends the new row added to the table to the task which asked
for the dynamic creation.
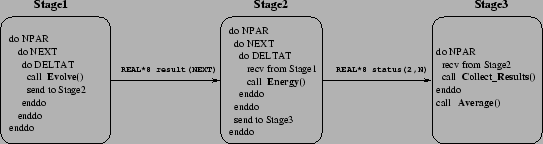
The test-case application chosen to show the benefits of our mixed task and data-parallel approach simulates the dynamics of a chain of N oscillators, coupled with unharmonic terms. Such system is known as the Fermi Pasta Ulam (FPU) model [9]. The characterization of the way such Hamiltonian systems reach their asymptotic equilibrium state has important implications in understanding the dynamic properties of systems with many degrees of freedom. The pseudo-code of the algorithm is shown in Figure 4. The algorithm basically consists of a main loop (on NEXT) which simulates the temporal evolution of the system (routine Evolve), through the integration of the equations of motion. As the system evolves, energy distribution is measured until equipartition is observed. Energy distribution is measured by routine Energy which implements the most computationally expensive part of the simulation: it involves two one-dimensional Fourier transforms and a reduction operation. To speed up the simulation, energy is not measured at each time step. Note, in fact, that the temporal loop (on NEXT) includes two further nested loops. Finally, since the evolution of the system depends on the sequence of random numbers used to generate initial conditions, the global simulation (i.e. the loop on NEXT) is repeated for NPAR times in order to average over some executions. The results of the NPAR simulations are thus collected by routine Collect_Results, while routine Average performs a statistical analysis.
. |
Scientists are particularly interested in the behavior of such systems for low energies, for which relaxation to equilibrium is particularly slow. In the energy range of interest, a number of time-steps of the order of 1010 have to be simulated before equipartition can be observed in the system.
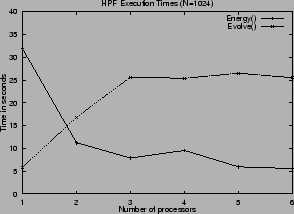
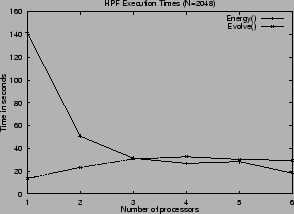
Starting from a Fortran 77 code, the HPF implementation of our
test-case was not particularly difficult. As already explained, most
computation time is spent within routines Evolve and Energy which simulate the evolution of the system and measure energy
distribution, respectively. Figure 5 shows the execution
times of these HPF subroutines on our testbed architecture as a
function of the number of processors used. The execution times of
routines Init, Collect_Results and Average are not
plotted, since they are negligible with respect to the times of the
subroutines above. Plots refer to the execution of a few time steps
of the simulation of two FPU chains with N=1024 and N=2048
oscillators, respectively. To take into account possible changes in
the system workload, we executed the same tests several times and only
report the best results obtained.
As can be seen, Energy and
Evolve routines behave very differently. While Energy
scale very well, and in some cases, due to the exploitation of the
memory hierarchy, exhibit super-linear speedups, Evolve do not
scale at all. This behavior of routine Evolve is due to stencil
array references, whose implementation is very inefficient on our
target platform. Further tests have shown that routine Evolve
starts scaling only when the size of the problem (i.e. the number of
oscillators simulated) is increased by at least one order of
magnitude. Unfortunately, computing the energy equilibrium for such
large systems is a computationally intractable problem, and would not
increase significantly the numerical accuracy of the simulation.
The consequence of this behavior is that to choose the best number of
processors to execute the simulation we have to trade off the need to
exploit high parallelism to reduce execution time of routine Energy, with the inefficiencies introduced by the corresponding
increase in the execution time of routine Evolve. While this is
not possible by using a pure data-parallel model, we can trade off
between these two contrasting requirements by adopting a mixed task
and data parallel approach.
|
Mixed task and data parallelism has been exploited by structuring the
HPF code of the sample application according to two common forms of
task parallelism: pipeline and master-slave. In order to
obtain the actual implementations, the templates implementing the
pipeline and master-slave skeletons provided by the high-level
coordination language were instantiated with the application source
code, as well as with the calls to the COLT![]() primitives which
initialize the communication channels and exchange data between the
data-parallel tasks. For our purposes we thus instantiated the
templates which implement the first, middle and last stages of the
pipeline skeleton, and the master and the slave task of the
master-slave structure. The set of instantiated templates were then
compiled and linked with the COLT
primitives which
initialize the communication channels and exchange data between the
data-parallel tasks. For our purposes we thus instantiated the
templates which implement the first, middle and last stages of the
pipeline skeleton, and the master and the slave task of the
master-slave structure. The set of instantiated templates were then
compiled and linked with the COLT![]() and PVM libraries to obtain the
application executables. Below we describe the two different
implementations and discuss in detail the results of the experiments
conducted on our SMP cluster.
and PVM libraries to obtain the
application executables. Below we describe the two different
implementations and discuss in detail the results of the experiments
conducted on our SMP cluster.
The overall throughput of such a pipeline can be improved by increasing the bandwidth of each pipeline stage, i.e. by reducing the time required to process each stream element, and at the same time by maintaining the bandwidths of all the stages balanced. The bandwidth of each data-parallel stage can be increased in two ways: either by adding processors for its data-parallel execution, or by replicating the stage into several copies [17]. Replication, however, can only be exploited if the computation performed by the stage does not depend on its internal ``state''. Moreover, replication may entail modifying the ordering of the stream elements sent from the copies of the replicated stage to the next pipeline stage. This may happen because distinct elements of the stream may have different execution times, or because the capacities of the processors executing the replicas of the stage may be different or may change due to variations in workstation loads. To avoid load imbalance problems, the templates adopted to support stage replication exploit dynamic policies, according to which replicated stages self-schedule jobs by signaling to the preceding stage their availability to receive a further stream element, while the following stage non-deterministically receives the results from all the copies of the replicated stage.
| Problem Size=1024 | Problem Size=2048 | |||||||
| Procs | HPF | COLT |
Ratio | HPF | COLT |
Ratio | ||
| sec. | Structure | sec. | sec. | Structure | sec. | |||
| 1 | 34.6 | - | - | - | 148.0 | - | - | - |
| 2 | 38.2 | - | - | - | 87.2 | - | - | - |
| 3 | 36.4 | [ |
15.6 | 2.33 | 70.4 | [ |
56.0 | 1.26 |
| 4 | 41.7 | [1 (2) 1] | 14.7 | 2.84 | 69.3 | [1 (2) 1] | 55.8 | 1.25 |
| 5 | 35.3 | [ |
7.7 | 4.57 | 55.2 | [ |
31.0 | 1.78 |
| [ |
7.6 | 4.64 | [ |
27.8 | 1.98 | |||
| 6 | 34.0 | [1 (4) 1] | 9.9 | 3.43 | 52.1 | [1 (4) 1] | 32.6 | 1.59 |
| [1 (2,2) 1] | 7.6 | 4.47 | [1 (2,2) 1] | 30.2 | 1.72 | |||
| [1 ( |
7.5 | 4.53 | [1 ( |
26.8 | 1.96 | |||
Returning to our test-case application, experiments showed that the
middle stage, Stage2, is the slowest one. Moreover, Stage2 can
be replicated since it is stateless, and the correctness of the
computation performed by Stage3 is preserved independently of the
reception order of data from Stage2.
Figure 5 clearly shows that the efficiency of routine Energy is at its maximum when it is executed on only two processors,
that is within a single 2-way SMP. In particular, the speedup
observed in this case is superlinear due to a better exploitation of
the memory hierarchies. Therefore, if m 2-way SMPs are available
for executing Stage2, it is more profitable to replicate the stage
into m copies, each running on a single SMP, rather than exploiting
all the ![]() processors to execute a single instance of
Stage2. Moreover, since we noted that when a single instance of
Stage2 runs on a 2-way dedicated SMP, the computational bandwidth
of the SMP is not completely saturated, two replicas of the second
stage can be profitably mapped onto each SMP to optimize the overall
throughput, i.e. the number of Energy computations completed
within the unit of time.
processors to execute a single instance of
Stage2. Moreover, since we noted that when a single instance of
Stage2 runs on a 2-way dedicated SMP, the computational bandwidth
of the SMP is not completely saturated, two replicas of the second
stage can be profitably mapped onto each SMP to optimize the overall
throughput, i.e. the number of Energy computations completed
within the unit of time.
Table 1 compares the execution times obtained
with the COLT![]() pipeline and the pure HPF implementations of our
test-case application. The results reported refer to a few hundred
iterations of the simulation run by fixing the problem size to 1024
and 2048 oscillators, respectively. All the experiments were
conducted when no other user was logged in the machines. As regards
the COLT
pipeline and the pure HPF implementations of our
test-case application. The results reported refer to a few hundred
iterations of the simulation run by fixing the problem size to 1024
and 2048 oscillators, respectively. All the experiments were
conducted when no other user was logged in the machines. As regards
the COLT![]() implementation, the tests were performed by varying both
the number of processors used, and the ``organization'' of the
three-stage pipeline implementing the application (i.e. the degree of
parallelism of each stage and number of replicas of the middle stage).
The columns labeled Structure in the table indicate the mappings
used for the corresponding test. For example, in the rows that refer
to the tests conducted with six processors,
implementation, the tests were performed by varying both
the number of processors used, and the ``organization'' of the
three-stage pipeline implementing the application (i.e. the degree of
parallelism of each stage and number of replicas of the middle stage).
The columns labeled Structure in the table indicate the mappings
used for the corresponding test. For example, in the rows that refer
to the tests conducted with six processors, ![]() means that one processor was used for both the first and last stages
of the pipeline, while each of the two replicas of the middle stage
were run on two distinct processors. On the other hand, in the rows
that refer to the experiments conducted on three processors,
means that one processor was used for both the first and last stages
of the pipeline, while each of the two replicas of the middle stage
were run on two distinct processors. On the other hand, in the rows
that refer to the experiments conducted on three processors, ![]() (2)
(2) ![]() means that the corresponding test
was executed by mapping both Stage1 and Stage3 on the same
processor, and Stage2 on two other processors. Finally, in the
rows referring to experiments conducted on six processors,
means that the corresponding test
was executed by mapping both Stage1 and Stage3 on the same
processor, and Stage2 on two other processors. Finally, in the
rows referring to experiments conducted on six processors,
![]() means
that the corresponding test was executed by exploiting four replicas
of Stage2, each pair of replicas sharing the same 2-way SMP, so
that each istance of Stage2 had 2 half-processors (i.e.,
means
that the corresponding test was executed by exploiting four replicas
of Stage2, each pair of replicas sharing the same 2-way SMP, so
that each istance of Stage2 had 2 half-processors (i.e., ![]() processors) available.
processors) available.
The degree of parallelism exploited for Stage1 and Stage3 was fixed to one for all the tests conducted, because of the increase in execution times of routine Evolve when run on several processors, and the slight computational cost of the third stage of the pipeline.
The execution times measured with the COLT![]() implementations were
always better than the HPF ones. The performance improvements obtained
are quite impressive and range from 25% to 353%. If we consider the
results in terms of absolute speedup over the execution on a single
processor3, the COLT
implementations were
always better than the HPF ones. The performance improvements obtained
are quite impressive and range from 25% to 353%. If we consider the
results in terms of absolute speedup over the execution on a single
processor3, the COLT![]() implementation with the problem size N fixed to 1024, obtained
speedups of 2.2 and 4.6 on three and six processors,
respectively. On the tests conducted with 2048 oscillators, the
speedups were 2.6 on three processors and 5.5 on six.
implementation with the problem size N fixed to 1024, obtained
speedups of 2.2 and 4.6 on three and six processors,
respectively. On the tests conducted with 2048 oscillators, the
speedups were 2.6 on three processors and 5.5 on six.
The COLT![]() templates implementing the master-slave skeleton adopt
another dynamic strategy besides the self-scheduling policy used to
dynamically dispatch jobs onto the created slave tasks. This policy
enhances the handling of unpredictable variations in the processor
capacities occurring at run-time. In fact, only the master and one
slave are started at the beginning. Further slaves are created
dynamically by the master if its bandwidth is higher than the
aggregate bandwidth of all the slaves currently running. The
configuration of the master-slave application is thus tuned
dynamically, by chosing the best number of slave tasks on the basis of
an accurate run-time estimate which considers not only the algorithmic
features of the application, but also the actual capacities of the
machines involved.
templates implementing the master-slave skeleton adopt
another dynamic strategy besides the self-scheduling policy used to
dynamically dispatch jobs onto the created slave tasks. This policy
enhances the handling of unpredictable variations in the processor
capacities occurring at run-time. In fact, only the master and one
slave are started at the beginning. Further slaves are created
dynamically by the master if its bandwidth is higher than the
aggregate bandwidth of all the slaves currently running. The
configuration of the master-slave application is thus tuned
dynamically, by chosing the best number of slave tasks on the basis of
an accurate run-time estimate which considers not only the algorithmic
features of the application, but also the actual capacities of the
machines involved.
The completion times measured by running the master-slave implementation on
an un-loaded system are very similar to those obtained with the
pipeline version of the application when the same number of processors
is exploited. To evaluate the effectiveness of the strategy
exploited to dynamically tune the number of slave tasks as a function
of the bandwidth of the master and slaves, we introduced varying
artificial workloads onto the SMP running the master task. In
particular, up to four cpu-bound processes were executed concurrently
with the master task. Table 2 reports the
results obtained and compares them with those obtained by disabling
dynamic task creation and always exploiting four slave tasks (Static
master-slave). The table highlights that in the absence of external
workloads the static implementation is slightly more
efficient. However, as the load on the SMP running the master task
increases, the dynamic master-slave implementation adapts itself by
starting less slave tasks and outperforms the static one. For
example, when four cpu-bound processes share the same 2-way SMP with
the master task, the COLT![]() dynamic master-slave implementation
becomes aware of the master's lower bandwidth and only starts two
slave tasks. On the other hand, in the static case the number of
slave tasks is fixed to four (the optimum configuration on an un-loaded
system) and the master pays additional overheads for initializing the
COLT
dynamic master-slave implementation
becomes aware of the master's lower bandwidth and only starts two
slave tasks. On the other hand, in the static case the number of
slave tasks is fixed to four (the optimum configuration on an un-loaded
system) and the master pays additional overheads for initializing the
COLT![]() communication channels and for scheduling and managing the
slave tasks whose aggregate bandwidth is significantly higher than the
master one. Moreover, the dynamic strategy implemented ensures that
the minimum number of slave tasks needed to maximize the overall
throughput is exploited, thus minimizing resource usage.
communication channels and for scheduling and managing the
slave tasks whose aggregate bandwidth is significantly higher than the
master one. Moreover, the dynamic strategy implemented ensures that
the minimum number of slave tasks needed to maximize the overall
throughput is exploited, thus minimizing resource usage.
We have presented COLT![]() ,
a coordination layer for HPF tasks, which
exploits PVM to implement optimized inter-task communications. COLT
,
a coordination layer for HPF tasks, which
exploits PVM to implement optimized inter-task communications. COLT![]() allows a mixed task and data-parallel approach to be adopted, where
data-parallel tasks can be started either statically (at loading-time)
or dynamically (on demand). It worth remarking that, differently from
other related
proposals [8,11,6,16], our
framework for integrating task and data parallelism is not based on
the adoption of an experimental HPF compilation system. An optimized
commercial product such as the PGI pghpf compiler, now available
for different platforms and also for clusters of Linux PCs, can be
instead employed.
allows a mixed task and data-parallel approach to be adopted, where
data-parallel tasks can be started either statically (at loading-time)
or dynamically (on demand). It worth remarking that, differently from
other related
proposals [8,11,6,16], our
framework for integrating task and data parallelism is not based on
the adoption of an experimental HPF compilation system. An optimized
commercial product such as the PGI pghpf compiler, now available
for different platforms and also for clusters of Linux PCs, can be
instead employed.
An important features of the coordination model proposed in this paper
is the adoption of a high-level skeleton-based coordination
language, whose associated compiler generates HPF tasks with calls to
the COLT![]() support on the basis of pre-packaged templates associated
with the task-parallel skeletons chosen by programmers, e.g.
pipeline, processor farm, and master-slave skeletons.
support on the basis of pre-packaged templates associated
with the task-parallel skeletons chosen by programmers, e.g.
pipeline, processor farm, and master-slave skeletons.
We showed, by using a simple test-case application, implemented with both
a pipeline and a master-slave skeleton, the usefulness of
a mixed task and data-parallel approach, which allows
performances to be optimized on a global basis by independently
choosing the best degree of parallelism for the various parts of the
application, each implemented by a different HPF task. In addition,
effective mapping strategies can be exploited, which map
tightly-coupled HPF tasks onto single SMPs, so that only intra-task
COLT![]() communications occur over the high-latency network.
communications occur over the high-latency network.
We conducted several experiments on our testbed cluster of SMPs.
Static optimizations, such as the choice of the best degree of
parallelism for the HPF tasks, were carried out on the basis of the
knowledge of task scalability. The COLT![]() implementation obtained
encouraging performances, with improvements of up to 353% in the
completion time over the pure HPF implementation. Finally, it is
worth noting that the largest improvements with respect to the pure
HPF implementation were obtained in the tests involving a smaller
dataset. This behavior is particularly interesting because for many
important applications, e.g. in image and signal processing
applications, the size of the data sets is limited by physical
constraints which cannot be easily overcome [12].
implementation obtained
encouraging performances, with improvements of up to 353% in the
completion time over the pure HPF implementation. Finally, it is
worth noting that the largest improvements with respect to the pure
HPF implementation were obtained in the tests involving a smaller
dataset. This behavior is particularly interesting because for many
important applications, e.g. in image and signal processing
applications, the size of the data sets is limited by physical
constraints which cannot be easily overcome [12].
This document was generated using the LaTeX2HTML translator Version 98.2 beta6 (August 14th, 1998)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 1 colt_html.tex
The translation was initiated by raffaele perego on 2000-01-17