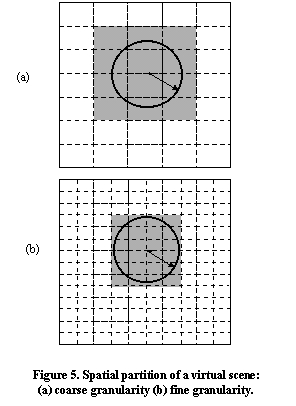
The lower bound of the virtual scene granularity is limited by the execution time of the mapping function: when the granularity decreases, the number of virtual segments increases and the time required for test and update their status increases.
5. EXPERIMENTAL RESULTS AND CONCLUSIONS
The virtual segments management in large synthetic environments
was studied and experimented on a Silicon Graphics multiprocessor, Onyx,
with four MIPS R10000 processors and Infinite Reality graphic accelerator,
under IRIX 6.4 operating system.
The synthetic environment consists in the geographical area of our country, over 6 latitude x 10 longitude degrees. This large scene is divided into 240 virtual segments, each over 0.5 x 0.5 degrees. Each segment is a multiresolution model of a terrain region, with features and cultural objects placed inside. The medium complexity of a segment is about 10000 polygons for terrain, features and 3-D objects, and requires a memory space of about 2 Mbyte. The whole database requires 240 x 2 M bytes = 480 Mbytes, which are not available. A virtual segment management function built-in the image generation program, allow to keep in available memory (of about 180 Mbytes) only the segments which are needed for the given observer viewpoint, and replace them when needed.
The virtual segments of the scene graph management replaces the virtual memory mechanism of the operating system. All pages of the processes are locked in the memory, so that, for the image generation program no page fault and swapping can occurs.
The management of memory space is, instead, controlled by the application program. Virtual segments of the synthetic environment are loaded or discarded, depending on the observer viewpoint, and not on page faults, such as in operating system virtual memory management. This large synthetic environment is used for airplane pilots training, using detailed modeling of the terrain, features and cultural area.
6. REFERENCES
[1] Hwang, K., Advanced Computer Architecture: Parallelism,
Scalability, Programmability, McGrow-Hill, 1993.
[2] Ionescu, F.,Codesign of a Parallel Architecture for
Visual Systems, in Proceedings of CSCS97 (Bucharest, Romania, May
1997), 242-245.
[3] Ionescu, F., Gheorghiu, C., Englert, C., Popa,C.,
Suciu, I., Optimization of the execution time in a distributed system implementing
a full flight simulator, in Proceedings of ITEC98, (Lausanne, Switzerland,
April 1998), 509-514.
[4] Ionescu, F., Ionescu, M., "Pipeline processing of
shared graphs in multiprocessor systems", in Proceedings of PDPTA99, (Las
Vegas, Nevada, June 1999), 1958-1963.
[5] Silicon Graphics, Inc., Topics in IRIX Programming,
Mountain View, Calif., 1996.